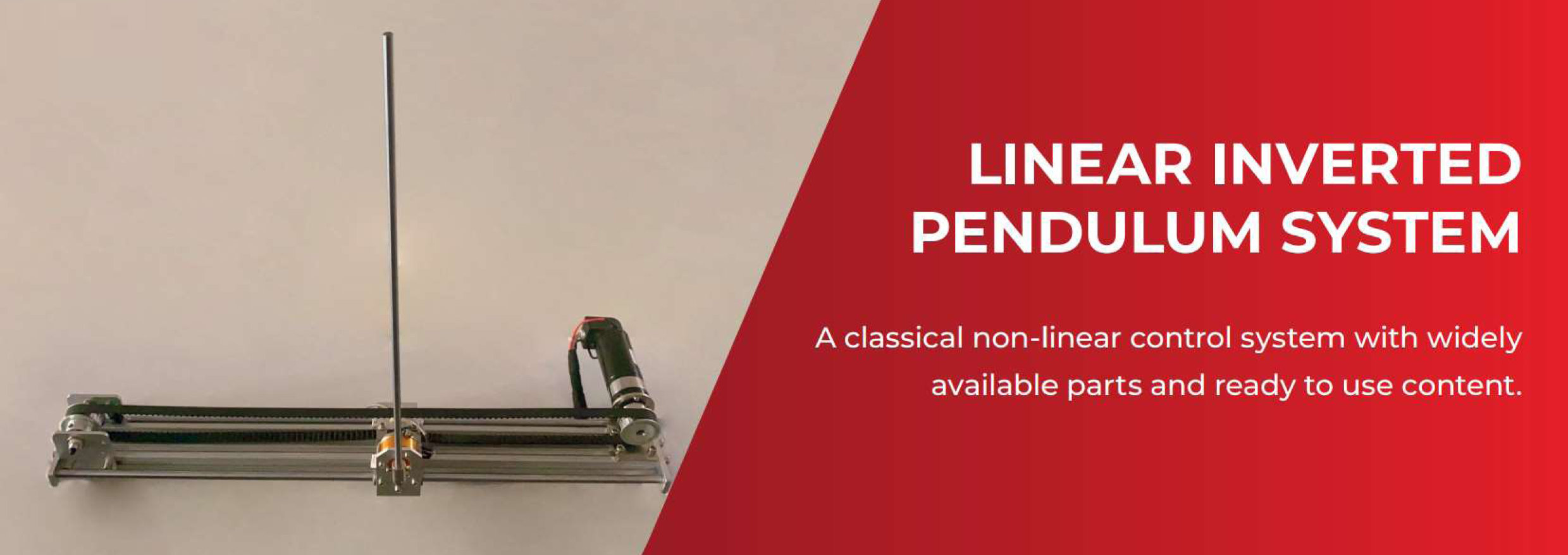
OVERVIEW
The inverted pendulum system is a popular demonstration of using feedback control to stabilize an open-loop unstable system and widely used as a benchmark for testing control algorithms. The system can be used to teach students how to balance a vertical rod at the tip of a moving arm.
HIGH-AVAILABILITY SYSTEM
Components of the system are deliberately chosen to maximize the efficiency without compromising quality. Mechanical components are stiff and durable, built to last for many years.
The electronic parts are connected with clean cables and printed boards.

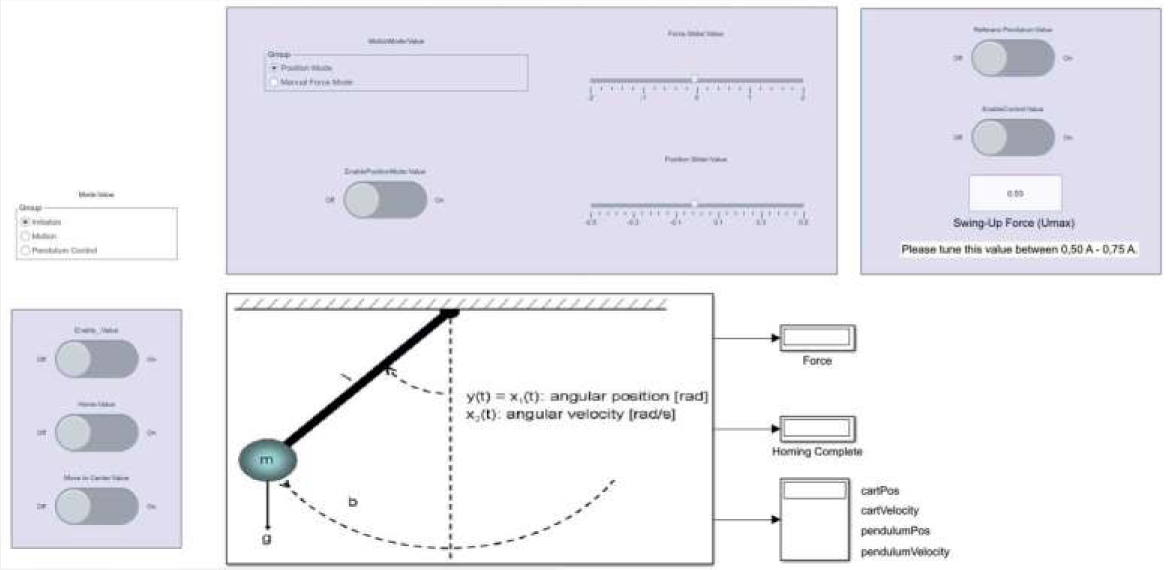
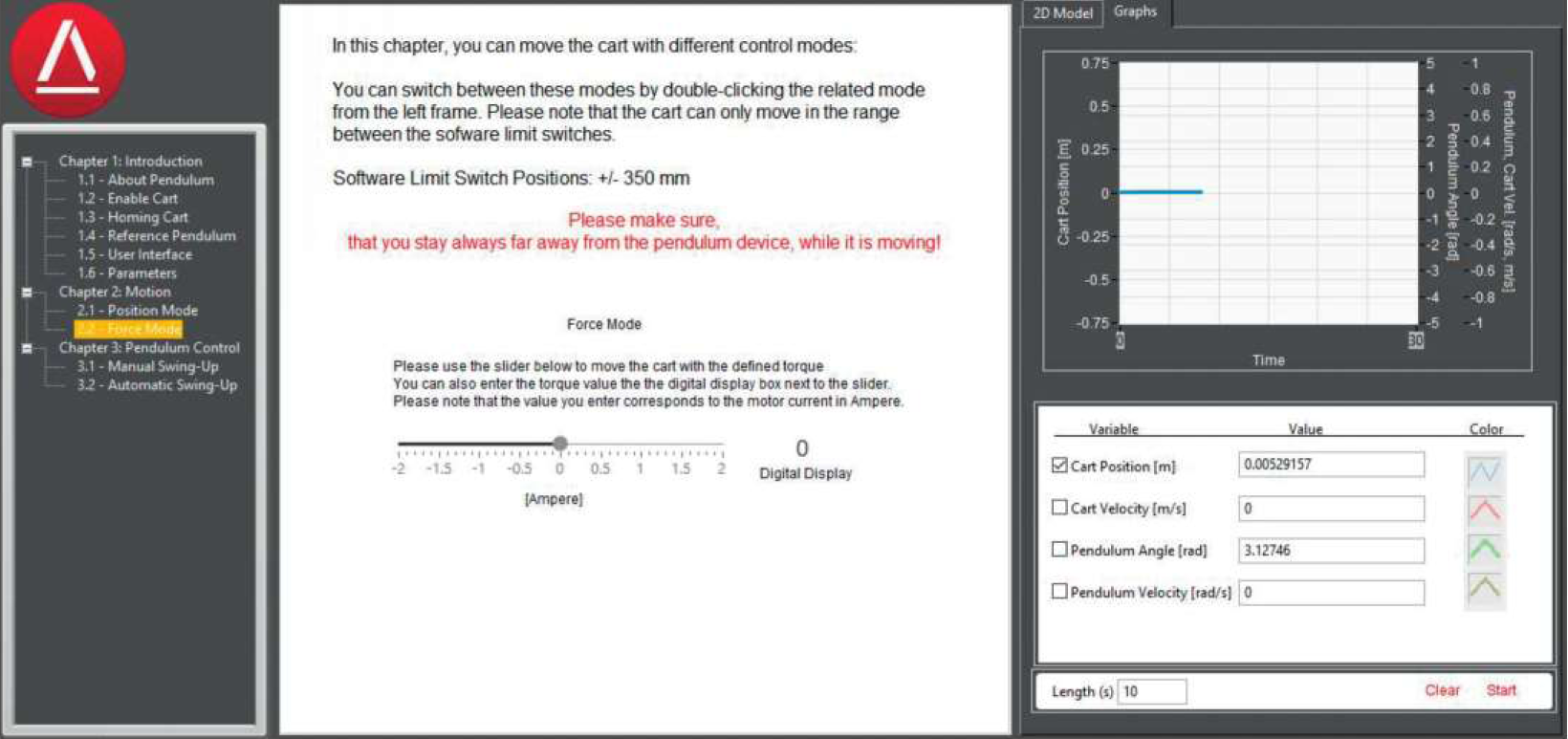
USER-FRIENDLY GUI AND OPEN-SOURCE SOFTWARE
Available with open-source codes, allows students to implement their own controller designs. A Graphical User Interface (GUI) exists to operate the system out-of-the box.
Features
- Assembled and ready to control plant with durable DC Servo Motor
- Open architecture suitable for engineering disciplines and research projects related with control systems
- Compatible with NI LabVIEW".. and MATLAB®/ Simulink®
- Getting Started executable program with rich Graphical User Interface to deliver out-of-the-box experience
- Open-source code examples of Pl & PID, Z-domain controllers.
- Fully documented system models and parameters provided
- Precision-crafted chassis constructed of durable aluminum metal
- Implementation of basic and advanced digital control techniques
- Enables students to create their own real-time algorithms
Curriculum
| Components of Linear Inverted Pendulum System | Fundamentals of DC Servo Motors, Motor Drives and Control Blocks | Feedback in Control Systems | System Modeling |
|---|---|---|---|
|
|
|
|
| Performance Measures |
|---|
Nonlinear Swing-up Control Pl and PIO controller design and examples |